Подключение TB6560 к Arduino
Подобные драйверы широко используются в разработке и создании своими руками ЧПУ систем, копировальной техники, простых 3D-принтеров и в целом девайсов с управлением шаговыми двигателями.
Кроме того, именно модель TB6560 сможет функционировать с токами более 1 Ампера (с возможностью изменения силы тока и его стабилизацией). С нею двигатель не так нагревается (как при применении аналогичных приборов). Набор режимов неплохо сбалансирован. Продумана несложная настройка шагов двигателя (полный, 1∕2, 1/8 и 1/16 шага).
Основные технические параметры модуля таковы:
- напряжение: 10-24V (прописывается на плате);
- интерфейс: STEP/DIR;
- настраиваемый выходной ток: 0.3 - 3А;
- дискретизация шага: 1, 2, 4, 8, 16;
- регулировка тока удержания: 20%, 50%;
- температура эксплуатации: -10 - 45° С;
- защита от перегрева;
- световые индикаторы: Power (индикация питания), Run (режим работы);
- вес: около 73 г.;
- размеры: 75 x 50 x 33 мм.
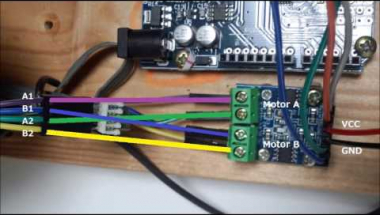
Схема подключения TB6560 к Arduino выглядит следующим образом:
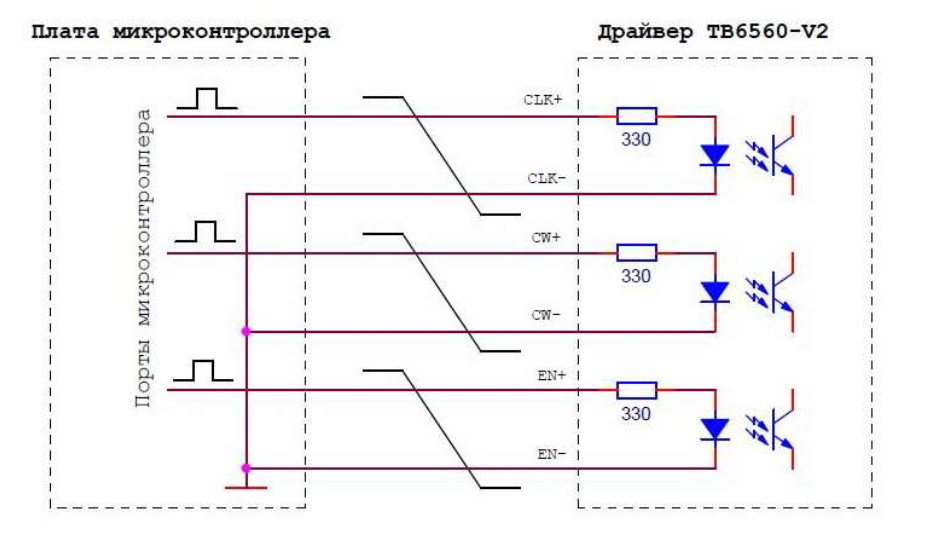
Под платой микроконтроллера подразумевается плата расширения Arduino Uno (или любая другая совместимая).
Для проверки работоспособности модуля напишем скетч:
int Distance = 0; // записываем количество шагов, которое было совершено
void setup() {
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
digitalWrite(8, LOW);
digitalWrite(9, LOW);
}
void loop() {
digitalWrite(9, HIGH);
delayMicroseconds(100);
digitalWrite(9, LOW);
delayMicroseconds(100);
Distance = Distance + 1; // записываем этот шаг
// проверяем, не находимся ли мы в конце перемещения
// два поворота при мосте 1/8 и 1 поворот для моста 1/6 (для этого скетча)
if (Distance == 3200) { // Мы добрались до крайней точки, начинаем вращение в противоположном направлении
if (digitalRead(8) == LOW) {
digitalWrite(8, HIGH); }
else {
digitalWrite(8, LOW);
} // Обнуляем расстояние, так как мы начинаем новое движение
Distance = 0;
// Делаем паузу на пол секунды
delay(500);
}
}
Программист микроконтроллеров с 8-ми летним стажем, работал в таких компаниях как IBM, ASUS, Microsoft.
В комментариях с радостью отвечу на ваши вопросы.
Все статьи автора
В этой статье мы хотим продолжить тему подключения шаговых двигателей к Ардуино – на очереди рассказ о ШД Nema 17. Почему именно он? Эта модель считается...
Сегодня поговорим о том, как воплотить в жизнь подключение FPM10A к Arduino, что это за модуль, где используется, каковы параметры его работы и т.д. Речь идет...
Подключение A4988 к Ардуино понадобится во многих проектах, которые «гуляют» по Интернету. Данный драйвер активно используется при создании своими руками...
Подключение Motor Shield к Arduino у многих любителей электроники вызывает определенные затруднения. Тем не менее этот драйвер двигателей очень популярен и...
В данном обзоре речь пойдет о подключении L9110S к Arduino и основных параметрах этого двухканального драйвера. Напомним, подобные модули отлично вписываются...