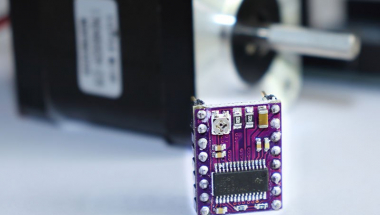
Драйвер A4988 к Arduino
Технические параметры модуля таковы:
- напряжение питания: 8-35 В;
- 5 режимов микрошага: полный, полшага, четверть, 1/8, 1/16;
- напряжение логики: 3-5.5 В;
- имеется защита от перегрева и короткого замыкания;
- габариты: 20 мм х 15 мм х 10 мм.
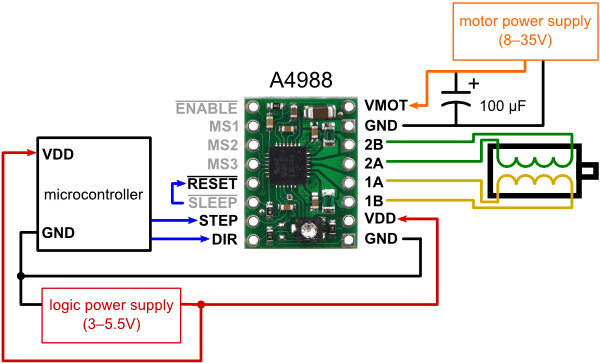
где ENABLE – включение (0) / выключение (5 В),
MS1, MS2, MS3 – выбор микрошага,
RESET – сброс данных,
DIR – направление вращения,
GND – общий.
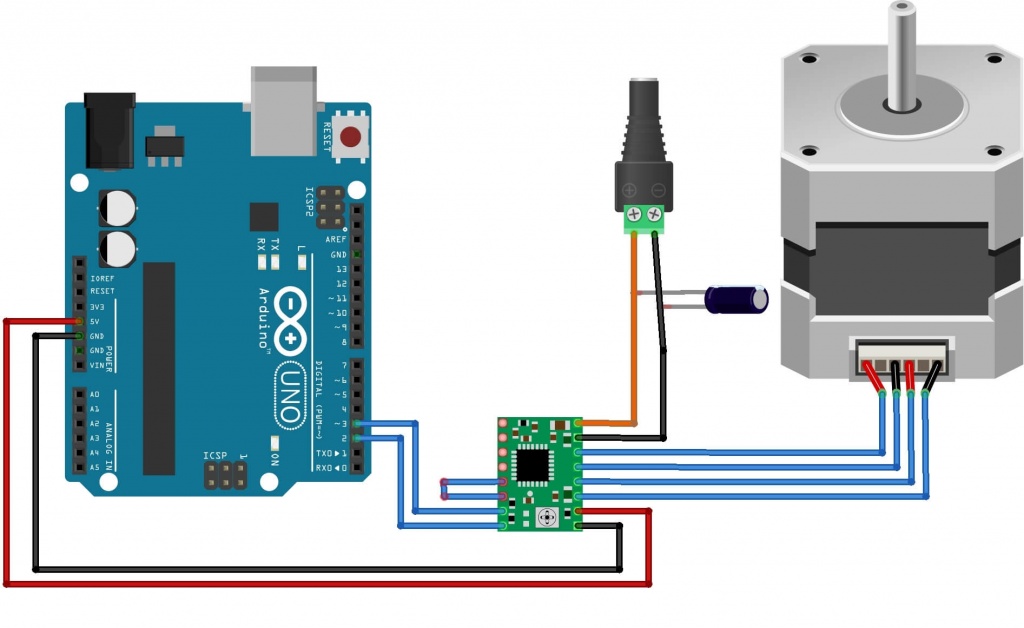
Подключаем драйвер A4988 к Arduino Uno – обратите внимание на принципиальную схему:
 Прописываем скетч для контроля движения шагового двигателя (ничего не меняем, пишем как есть):
Прописываем скетч для контроля движения шагового двигателя (ничего не меняем, пишем как есть):// пины для подключения контактов STEP, DIR
#define PIN_STEP 3
#define PIN_DIR 2
// количество шагов на 1 оборот
#define STEP_ROUND 200
// скорость двигателя
#define SPEED 10
void setup() {
// режим для STEP и DIR как OUTPUT
pinMode(PIN_STEP, OUTPUT);
pinMode(PIN_DIR, OUTPUT);
// начальные значения
digitalWrite(PIN_STEP, 1);
digitalWrite(PIN_DIR, 0);
}
void loop() {
// направление вращения
digitalWrite(PIN_DIR, HIGH);
// сделать 1 оборот
for(int j = 0; j < STEP_ROUND; j++) {
digitalWrite(PIN_STEP, HIGH);
delay(SPEED);
digitalWrite(PIN_STEP, LOW);
delay(SPEED);
}
// изменить направление вращения
digitalWrite(PIN_DIR, HIGH);
// сделать 1 оборот
for(int j = 0; j < STEP_ROUND; j++) {
digitalWrite(PIN_STEP, HIGH);
delay(SPEED);
digitalWrite(PIN_STEP, LOW);
delay(SPEED);
}
}Чтобы избавиться от вибрации двигателя, советуем использовать библиотеку AcclStepper (ссылки ищем в сети).
Важно! Не забывайте - подключение ∕ отключение шагового двигателя при включенном приводе приведет к его поломке.

Программист микроконтроллеров с 8-ми летним стажем, работал в таких компаниях как IBM, ASUS, Microsoft.
В комментариях с радостью отвечу на ваши вопросы.
Все статьи автора
В этой статье мы хотим продолжить тему подключения шаговых двигателей к Ардуино – на очереди рассказ о ШД Nema 17. Почему именно он? Эта модель считается...

Тема нашей сегодняшней статьи - драйвер для шаговых двигателей TB6560 и его подключение к Ардуино. Мы уже говорили с вами о практичности и основных...
Сегодня поговорим о том, как воплотить в жизнь подключение FPM10A к Arduino, что это за модуль, где используется, каковы параметры его работы и т.д. Речь идет...
Подключение Motor Shield к Arduino у многих любителей электроники вызывает определенные затруднения. Тем не менее этот драйвер двигателей очень популярен и...
DRV8825 - один из самых популярных контроллеров биполярного шагового двигателя. Сегодня мы рассмотрим его базовые параметры и познакомимся со схемой...