Подключение L9110S к Arduino
Напомним нашим читателям тот факт, что ШД – это отличный выбор для управления различными процессами в проектах. Они часто используются в конструировании простых ЧПУ станков, 3-Д принтеров, копировальной ∕ факсимильной техники, манипуляторов и т.п. на платформе Ардуино.
Рассмотрим технические параметры драйвера:
- напряжение питания: 2.5-12 V;
- совместимость входа: TTL / CMOS;
- max ток: 800mA (поканально);
- диапазон рабочих температур: 0℃ … +80℃;
- габариты: 30 х 24 х 15 mm;
- вес: около 7 г.
Электрическая схема показана на скриншоте:
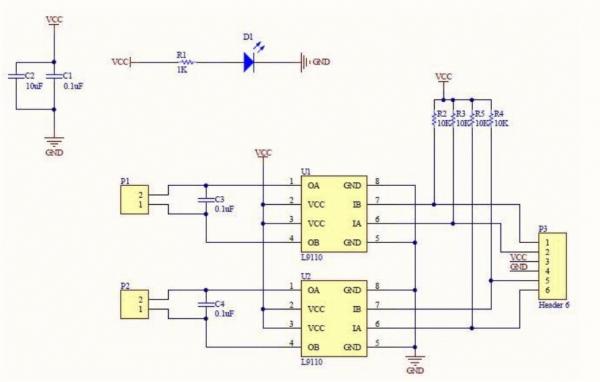
Подключение L9110S к Arduino
Примеров использования модуля очень много. Мы остановимся на самых элементарных. Первая схема сборки (стандартная, если можно так ее назвать) выглядит вот так:
По сути мы взяли контроллер Уно, модуль L9110S, ШД, провода и соединили все это вместе.
Прописываем коды с целью тестирования управления:
int Speed = 0;
const int IA1 = 5; // Управляющий вывод 1
const int IA2 = 6; // Управляющий вывод 2
void setup() {
pinMode(IA1, OUTPUT);
pinMode(IA2, OUTPUT);
Serial.begin(9600);
}
void loop() {
if (Serial.available() > 0) {
String s = Serial.readString();
Speed = s.toInt(); // преобразуем считанную строку в число
}
if (Speed > 0) { // если число положительное, вращаем в одну сторону
analogWrite(IA1, Speed);
analogWrite(IA2, LOW);
}
else { // иначе вращаем ротор в другую сторону
analogWrite(IA1, LOW);
analogWrite(IA2, -Speed);
}
}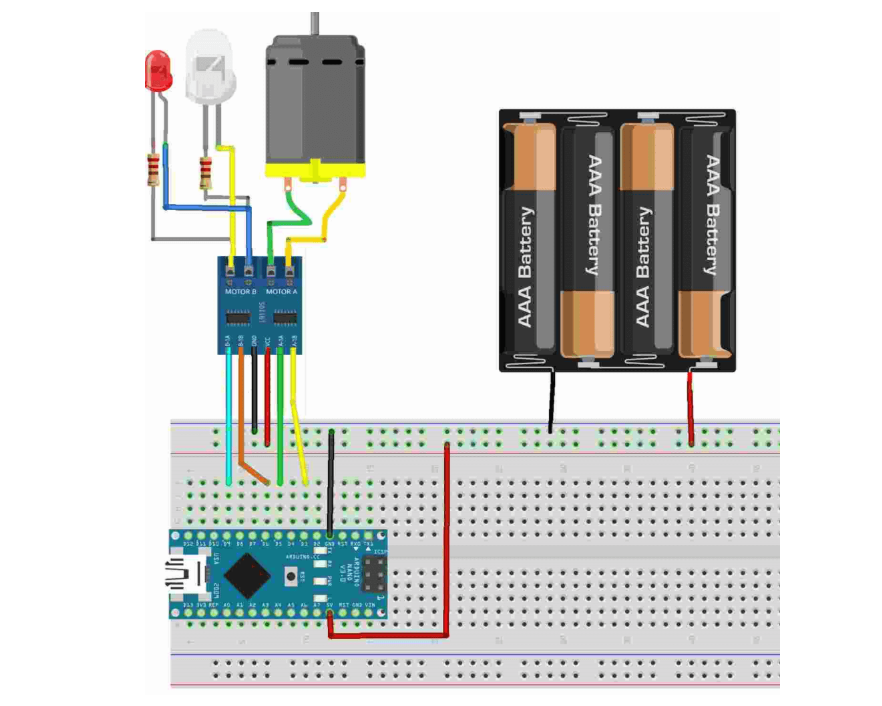 Задействованы такие аппаратные компоненты:
Задействованы такие аппаратные компоненты:- Микроконтроллер Arduino Uno.
- Модуль драйвера L9110S.
- Мотор.
- Макетная плата.
- Несколько светодиодов (белый и красный).
- Источник питания (4 батарейки).
- Соединительные провода.
// Драйвер двигателя L9110S
// by Dr.S
// 3d-diy.ru
// определяем, какие порты будем использовать для управления мотором и светодиодами
#define FORWARD 3
#define BACK 5
#define WHITE_LIGHT 6
#define RED_LIGHT 9
#define LEDOUT 13
#define TIME 5000
unsigned char Forward_Speed = 200;
unsigned char Back_Speed = 160;
unsigned char White_Light = 210;
unsigned char Red_Light = 220;
void setup() {
// объявляем пины управления мостом как выходы:
pinMode(FORWARD, OUTPUT);
pinMode(BACK, OUTPUT);
pinMode(WHITE_LIGHT, OUTPUT);
pinMode(RED_LIGHT, OUTPUT);
pinMode(LEDOUT, OUTPUT);
}
// the loop routine runs over and over again forever:
void loop() {
// Робот едет вперед в течении времени TIME
analogWrite(WHITE_LIGHT, White_Light); // Включить белый светодиод- "фары"
analogWrite(RED_LIGHT, 0);
analogWrite(FORWARD, Forward_Speed); // Робот пошел вперед
analogWrite(BACK, 0);
delay( TIME); // и немного подождать
// Робот включает "фары" на половину обычной яркости и стоит
analogWrite(WHITE_LIGHT, White_Light / 2); // Включить белый светодиод- "фары" как стояночные огни
analogWrite(RED_LIGHT, 0);
analogWrite(FORWARD, 0); // Робот стоит
analogWrite(BACK, 0);
delay(TIME); // и немного подождать
// Робот включает красные светодиоды "заднего хода" и идет назад
analogWrite(WHITE_LIGHT, 0); // Включить белый светодиод- "фары" как стояночные огни
analogWrite(RED_LIGHT, Red_Light);
analogWrite(FORWARD, 0);
analogWrite(BACK, Back_Speed); // Робот идет назад
delay( TIME); // и немного подождать
// Робот включает попеременно красные и белые светодиоды и стоит
analogWrite(WHITE_LIGHT, 0);
analogWrite(RED_LIGHT, Red_Light / 2); // Включить красный светодиод как стояночные огни
analogWrite(FORWARD, 0);
analogWrite(BACK, 0); // Робот стоит
delay( TIME / 2); // и немного подождать
analogWrite(WHITE_LIGHT, White_Light / 2); // Включить белый светодиод- "фары" как стояночные огни
analogWrite(RED_LIGHT, 0);
delay( TIME / 2); // и немного подождать
}
Программист микроконтроллеров с 8-ми летним стажем, работал в таких компаниях как IBM, ASUS, Microsoft.
В комментариях с радостью отвечу на ваши вопросы.
Все статьи автора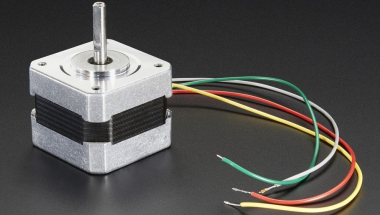
В этой статье мы хотим продолжить тему подключения шаговых двигателей к Ардуино – на очереди рассказ о ШД Nema 17. Почему именно он? Эта модель считается...
На повестке дня – подключение L293D к Arduino, знакомство с техническими характеристиками модуля, его практическим применением и простейшими схемами сборки....
Сегодня поговорим о том, как воплотить в жизнь подключение FPM10A к Arduino, что это за модуль, где используется, каковы параметры его работы и т.д. Речь идет...

В новом информационном обзоре рассматриваем GSM модуль SIM800L к Arduino. Почему выбрано именно это устройство? Во-первых, оно достаточно известно и популярно...
Подключение Motor Shield к Arduino у многих любителей электроники вызывает определенные затруднения. Тем не менее этот драйвер двигателей очень популярен и...