MPU 9250 и Arduino
Да и в целом любителям робототехники и проектирования подобный девайс с функцией 3 в 1 (акселерометр, гироскоп, магнитометр) точно не помешает, ведь такие устройства наравне с датчиками движения широко востребованы в среде любителей «самоделок». А раз так – нам необходимо детальнее познакомиться с его техническими характеристиками и схемами подключения к Arduino.
Начнем с первого пункта – параметры:
- питание: 3.5 – 5 V (имеется внутренний стабилизатор);
- интерфейс: шина I2C (400кГц), SPI (1 МГц);
- рабочие диапазоны гироскопа: ± 250 /500 /1000 /2000 ° / сек;
- --- акселерометра: ± 2 /± /4 ±/ 8 ± /16 г;
- диапазон измерения магнитометра: ± 4800uT;
- габаритные размеры: 15 x 25 мм.
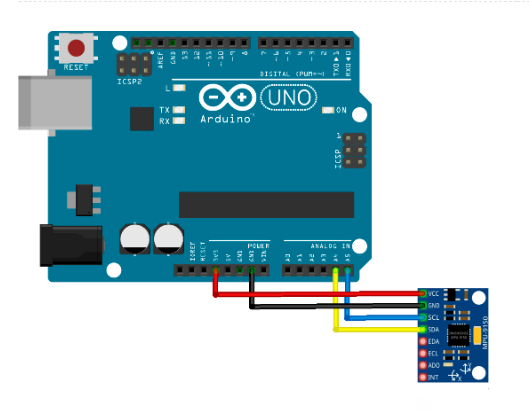
Теперь разберемся с главным вопросом – как подключить MPU 9250 к Ардуино. Для этой цели нам понадобятся: плата расширения Arduino Uno, непосредственно IMU датчик, макетная плата, соединительные провода (для подключения к персональному компьютеру - USB кабель). Схема подключения сенсора выглядит следующим образом (через I2C):
 Для считывания данных одновременно с трех датчиков предлагаем написать такой скетч:
Для считывания данных одновременно с трех датчиков предлагаем написать такой скетч:#include <Wire.h>
#include <TimerOne.h>
#define MPU9250_ADDRESS 0x68
#define MAG_ADDRESS 0x0C
#define GYRO_FULL_SCALE_250_DPS 0x00
#define GYRO_FULL_SCALE_500_DPS 0x08
#define GYRO_FULL_SCALE_1000_DPS 0x10
#define GYRO_FULL_SCALE_2000_DPS 0x18
#define ACC_FULL_SCALE_2_G 0x00
#define ACC_FULL_SCALE_4_G 0x08
#define ACC_FULL_SCALE_8_G 0x10
#define ACC_FULL_SCALE_16_G 0x18
// This function read Nbytes bytes from I2C device at address Address.
// Put read bytes starting at register Register in the Data array.
void I2Cread(uint8_t Address, uint8_t Register, uint8_t Nbytes, uint8_t* Data)
{
// Set register address
Wire.beginTransmission(Address);
Wire.write(Register);
Wire.endTransmission();
// Read Nbytes
Wire.requestFrom(Address, Nbytes);
uint8_t index=0;
while (Wire.available())
Data[index++]=Wire.read();
}
// Write a byte (Data) in device (Address) at register (Register)
void I2CwriteByte(uint8_t Address, uint8_t Register, uint8_t Data)
{
// Set register address
Wire.beginTransmission(Address);
Wire.write(Register);
Wire.write(Data);
Wire.endTransmission();
}
// Initial time
long int ti;
volatile bool intFlag=false;
// Initializations
void setup()
{
// Arduino initializations
Wire.begin();
Serial.begin(115200);
// Set accelerometers low pass filter at 5Hz
I2CwriteByte(MPU9250_ADDRESS,29,0x06);
// Set gyroscope low pass filter at 5Hz
I2CwriteByte(MPU9250_ADDRESS,26,0x06);
// Configure gyroscope range
I2CwriteByte(MPU9250_ADDRESS,27,GYRO_FULL_SCALE_1000_DPS);
// Configure accelerometers range
I2CwriteByte(MPU9250_ADDRESS,28,ACC_FULL_SCALE_4_G);
// Set by pass mode for the magnetometers
I2CwriteByte(MPU9250_ADDRESS,0x37,0x02);
// Request continuous magnetometer measurements in 16 bits
I2CwriteByte(MAG_ADDRESS,0x0A,0x16);
pinMode(13, OUTPUT);
Timer1.initialize(10000); // initialize timer1, and set a 1/2 second period
Timer1.attachInterrupt(callback); // attaches callback() as a timer overflow interrupt
// Store initial time
ti=millis();
}
// Counter
long int cpt=0;
void callback()
{
intFlag=true;
digitalWrite(13, digitalRead(13) ^ 1);
}
// Main loop, read and display data
void loop()
{
while (!intFlag);
intFlag=false;
// Display time
Serial.print (millis()-ti,DEC);
Serial.print ("t");
// _______________
// ::: Counter :::
// Display data counter
// Serial.print (cpt++,DEC);
// Serial.print ("t");
// ____________________________________
// ::: accelerometer and gyroscope :::
// Read accelerometer and gyroscope
uint8_t Buf[14];
I2Cread(MPU9250_ADDRESS,0x3B,14,Buf);
// Create 16 bits values from 8 bits data
// Accelerometer
int16_t ax=-(Buf[0]<<8 | Buf[1]);
int16_t ay=-(Buf[2]<<8 | Buf[3]);
int16_t az=Buf[4]<<8 | Buf[5];
// Gyroscope
int16_t gx=-(Buf[8]<<8 | Buf[9]);
int16_t gy=-(Buf[10]<<8 | Buf[11]);
int16_t gz=Buf[12]<<8 | Buf[13];
// Display values
// Accelerometer
Serial.print (ax,DEC);
Serial.print ("t");
Serial.print (ay,DEC);
Serial.print ("t");
Serial.print (az,DEC);
Serial.print ("t");
// Gyroscope
Serial.print (gx,DEC);
Serial.print ("t");
Serial.print (gy,DEC);
Serial.print ("t");
Serial.print (gz,DEC);
Serial.print ("t");
// _____________________
// ::: Magnetometer :::
// Read register Status 1 and wait for the DRDY: Data Ready
uint8_t ST1;
do
{
I2Cread(MAG_ADDRESS,0x02,1,&ST1);
}
while (!(ST1&0x01));
// Read magnetometer data
uint8_t Mag[7];
I2Cread(MAG_ADDRESS,0x03,7,Mag);
// Create 16 bits values from 8 bits data
// Magnetometer
int16_t mx=-(Mag[3]<<8 | Mag[2]);
int16_t my=-(Mag[1]<<8 | Mag[0]);
int16_t mz=-(Mag[5]<<8 | Mag[4]);
// Magnetometer
Serial.print (mx+200,DEC);
Serial.print ("t");
Serial.print (my-70,DEC);
Serial.print ("t");
Serial.print (mz-700,DEC);
Serial.print ("t");
// End of line
Serial.println("");
// delay(100);
}На этом пока всё. Хороших вам проектов!

Программист микроконтроллеров с 8-ми летним стажем, работал в таких компаниях как IBM, ASUS, Microsoft.
В комментариях с радостью отвечу на ваши вопросы.
Все статьи автора
Сегодня поговорим о том, как воплотить в жизнь подключение FPM10A к Arduino, что это за модуль, где используется, каковы параметры его работы и т.д. Речь идет...
В новой информационной статье хотим поговорить с вами о том, как подключить GY-521 (MPU 6050), какие задачи имеет данный модуль, где применяется и т.д. Речь...
На повестке дня – подключение L293D к Arduino, знакомство с техническими характеристиками модуля, его практическим применением и простейшими схемами сборки....
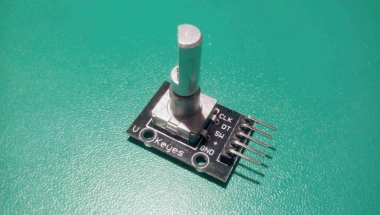
Модуль энкодер KY-040 является электромеханическим устройством, а точнее - датчиком угла поворота и вращения оси различных девайсов. Непосредственно сам прибор...
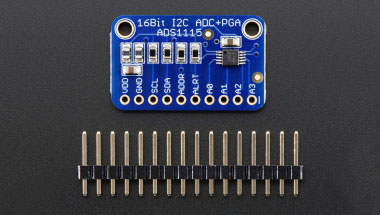
В этой статье мы рассмотрим подключение ADS1115 к Ардуино. Речь идет о 16-битном аналого-цифровом преобразователе, оснащенном 4 входами непосредственно для...