Подключаем 28BYJ-48 к Ардуино
Мы много раз говорили о сферах применения подобных устройств, но повторимся. Они пригодятся для проектирования, разработки и эффективного управления копировальной и факсимильной техникой, ЧПУ станками, трехмерными принтерами, роботами-манипуляторами и т.д.
Если взглянуть на технические параметры ШД, они такого плана:
- напряжение питания: 5, 12 V;
- количество шагов: 64;
- -- фаз – 4;
- скорость работы: 15 об/мин;
- задержка между шагами: 2 миллисек;
- частота: 100 Гц;
- габариты: 25х18мм;
- вес: 34-40 г.
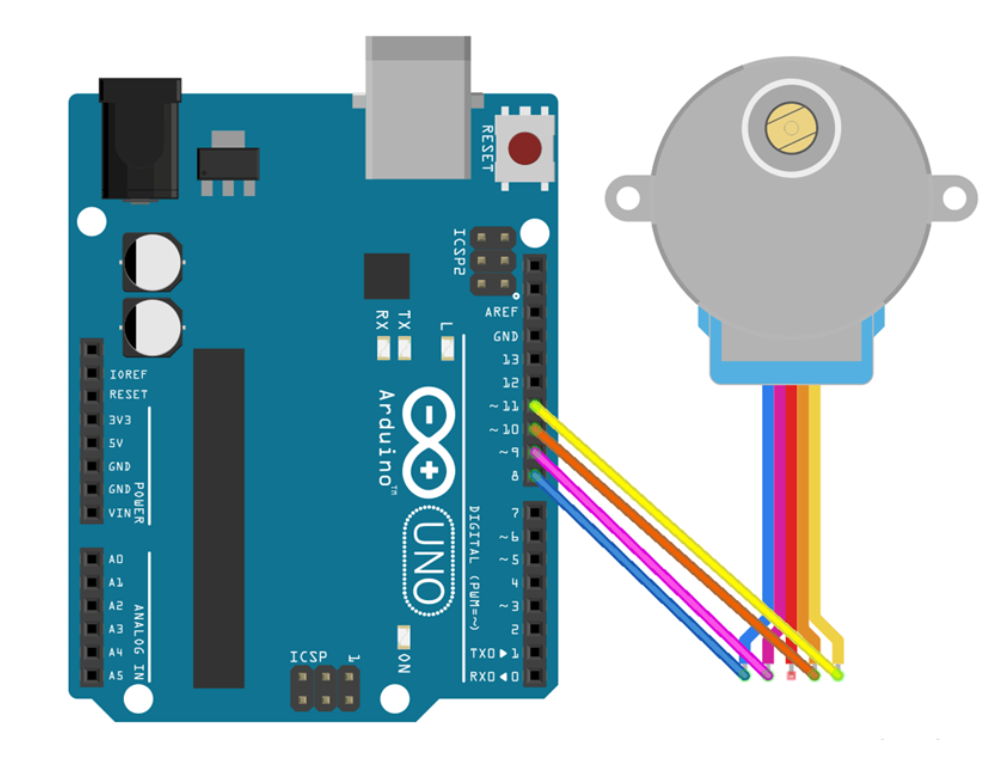
 На очереди - подключение 28BYJ-48 к Ардуино. Для реализации несложной схемы будем использовать такие аппаратные компоненты как:
На очереди - подключение 28BYJ-48 к Ардуино. Для реализации несложной схемы будем использовать такие аппаратные компоненты как:- Микроконтроллер Arduino Uno
- Шаговый мотор на чипе 28BYJ-48
- Соединительные провода
 К слову, любую схему можно модернизировать, добавив иные цифровые элементы, например, источник питания, драйвер, резисторы, потенциометр, кнопку для изменения направления вращения и т.д.
К слову, любую схему можно модернизировать, добавив иные цифровые элементы, например, источник питания, драйвер, резисторы, потенциометр, кнопку для изменения направления вращения и т.д.Но вернемся к нашему макету. Пропишем программный скетч для тестирования и проверки работоспособности:
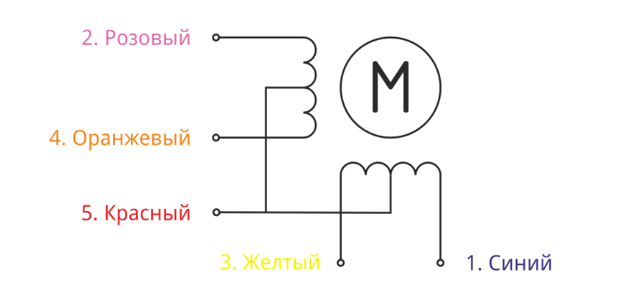
// Контакты Bl Pi Ye Or
int pins[] = {8, 9, 10, 11}; //Задаем пины по порядку
int phases = 8; // для шагового режима установить 4
// Для шагового режима
//bool motorPhases[4][4] = { // [phase][pin]
//// -------- pins ----------
//// Winding A B A B
//// Motor Pin 1 2 3 4
//// Color Bl Pi Ye Or
// { 1, 1, 0, 0},
// { 0, 1, 1, 0},
// { 0, 0, 1, 1},
// { 1, 0, 0, 1}
//};
// Для полушагового режима
bool motorPhases[8][4] = { // [phase][pin]
// -------- pins ----------
// Winding A B A B
// Motor Pin 1 2 3 4
// Color Bl Pi Ye Or
{ 1, 1, 0, 0},
{ 0, 1, 0, 0},
{ 0, 1, 1, 0},
{ 0, 0, 1, 0},
{ 0, 0, 1, 1},
{ 0, 0, 0, 1},
{ 1, 0, 0, 1},
{ 1, 0, 0, 0}
};
void setup() {
for (int i = 0; i < 4; i++) pinMode(pins[i], OUTPUT);
}
int phase = 0;
int _step = 1; // Если у шага поменять знак, на -1 - изменится направление вращения.
void loop() {
phase += _step;
if (phase > 7) phase = 0;
if (phase < 0) phase = 7;
for (int i = 0; i < 4; i++) {
digitalWrite(pins[i], ((motorPhases[phase][i] == 1) ? HIGH : LOW));
}
// Пауза на вращение на один шаг/полушаг
delay(2); // Для шагового режима установить в 3
}Управление процессами осуществляется через монитор последовательного порта (Serial Monitor) – запускаем сочетанием клавиш Ctrl+Shift+M. В нем будут доступны нужные нам значения.
На этом пока все! Хороших вам проектов!

Программист микроконтроллеров с 8-ми летним стажем, работал в таких компаниях как IBM, ASUS, Microsoft.
В комментариях с радостью отвечу на ваши вопросы.
Все статьи автора
Сегодня поговорим о том, как воплотить в жизнь подключение FPM10A к Arduino, что это за модуль, где используется, каковы параметры его работы и т.д. Речь идет...
В этой статье мы рассмотрим подключение ADS1115 к Ардуино. Речь идет о 16-битном аналого-цифровом преобразователе, оснащенном 4 входами непосредственно для...

В новом информационном обзоре рассматриваем GSM модуль SIM800L к Arduino. Почему выбрано именно это устройство? Во-первых, оно достаточно известно и популярно...
Модуль энкодер KY-040 является электромеханическим устройством, а точнее - датчиком угла поворота и вращения оси различных девайсов. Непосредственно сам прибор...
Подключение Motor Shield к Arduino у многих любителей электроники вызывает определенные затруднения. Тем не менее этот драйвер двигателей очень популярен и...