Подключение AD9850 к Arduino
И начнем со сферы применения модуля. Цифровой DDS генератор задействуют во многих областях современной электроники (радиоэлектроники в том числе) – для определения и конфигурации технической характеристики тактов сигнальных волн, регулировки компонентов приемников (которые передают радиоволны), для создания аналоговых синтезаторов, с целью поиска оптимальных местоположений для трубопроводов и кабелей (даже на дальних расстояниях) и т.д. Сфер очень много, а потому модуль несомненно достоин полноценного информационного обзора!
Обратите внимание на технические характеристики синтезатора частот:
- напряжение питания: 3,3 – 5V;
- энергопотребление: 380 мВт при 5В, 155 мВт при 3,3В;
- частота тактового сигнала: 125 МГц (MAX);
- частота меандр: 0 – 1 МГц;
- диапазон рабочих температур: –40°C … +85°C;
- размеры: 45 х 25 х 15mm;
- вес: около 6 г.
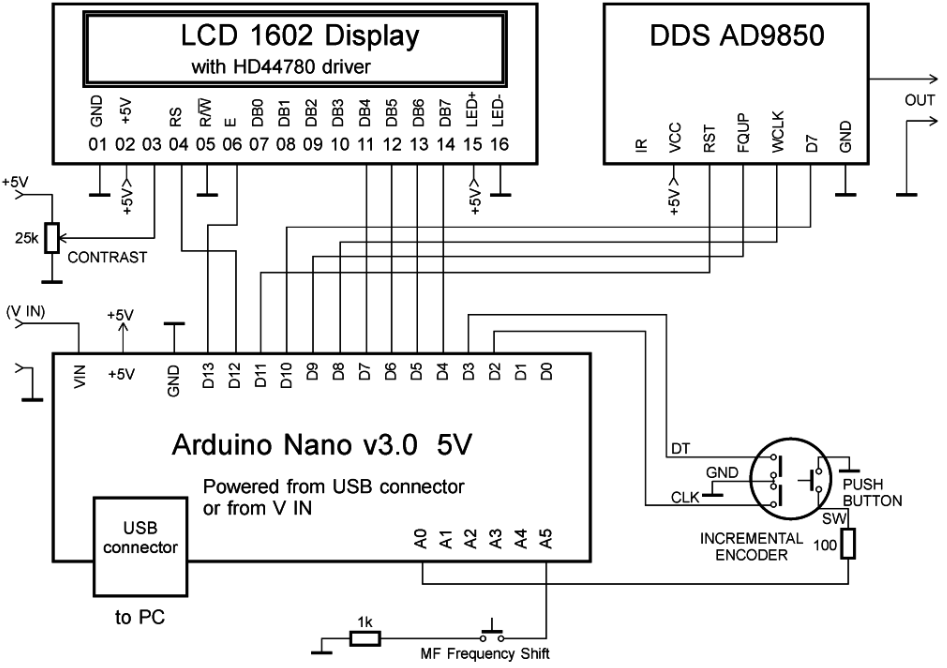
Теперь рассмотрим подробнее подключение AD9850 к Ардуино. Для реализации простого проекта нам понадобятся такие аппаратные элементы:
- Микроконтроллер Arduino Uno (Nano также подойдет)
- Модуль генератора AD9850
- LCD-дисплей
- Соединительные провода
- USB-провод

С платой Нано схема будет немного иной:
 Для оптимизации процесса прошивки советуем скачать и инсталлировать специализированное ПО – в этом случае библиотеку Rotary. Открыть архив с приложением следует в папке libraries (среда разработки IDE).
Для оптимизации процесса прошивки советуем скачать и инсталлировать специализированное ПО – в этом случае библиотеку Rotary. Открыть архив с приложением следует в папке libraries (среда разработки IDE).Прописываем программный скетч:
/*
* Rotary encoder library for Arduino.
*/
#ifndef rotary_h
#define rotary_h
#include "Arduino.h"
// Enable this to emit codes twice per step.
//#define HALF_STEP
// Enable weak pullups
#define ENABLE_PULLUPS
// Values returned by 'process'
// No complete step yet.
#define DIR_NONE 0x0
// Clockwise step.
#define DIR_CW 0x10
// Anti-clockwise step.
#define DIR_CCW 0x20
class Rotary
{
public:
Rotary(char, char);
// Process pin(s)
unsigned char process();
private:
unsigned char state;
unsigned char pin1;
unsigned char pin2;
};
#endifНа этом пока всё. Изучайте Arduino и развивайтесь во всех направлениях!

Программист микроконтроллеров с 8-ми летним стажем, работал в таких компаниях как IBM, ASUS, Microsoft.
В комментариях с радостью отвечу на ваши вопросы.
Все статьи автора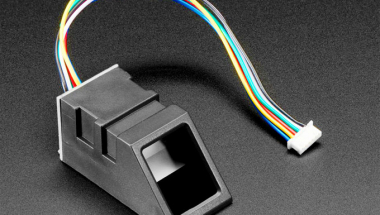
Сегодня поговорим о том, как воплотить в жизнь подключение FPM10A к Arduino, что это за модуль, где используется, каковы параметры его работы и т.д. Речь идет...

В новом информационном обзоре рассматриваем GSM модуль SIM800L к Arduino. Почему выбрано именно это устройство? Во-первых, оно достаточно известно и популярно...
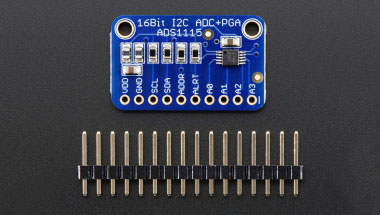
В этой статье мы рассмотрим подключение ADS1115 к Ардуино. Речь идет о 16-битном аналого-цифровом преобразователе, оснащенном 4 входами непосредственно для...
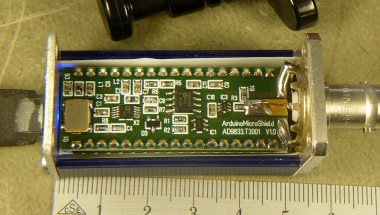
Наш новый информационный обзор посвящен подключению AD9833 к Ардуино. Мы постараемся рассмотреть базовые особенности устройства, его преимущества и схему...
Модуль энкодер KY-040 является электромеханическим устройством, а точнее - датчиком угла поворота и вращения оси различных девайсов. Непосредственно сам прибор...