Подключение L298N к Ардуино
Кроме промышленного сектора, шаговые двигатели находят применение в сфере любителей электроники и радиотехники. Работаете над конструированием робота? Желаете заставить двигаться сложный самодельный механизм либо движущиеся устройства? Модернизируете станок с ЧПУ? Во всех этих случаях не обойтись без рассматриваемого нами механизма.
Обратимся к техническим параметрам модуля:
- напряжение питания: до 35V;
- рабочий ток (поканально): 2 А;
- потребляемый логикой ток: 36mA;
- периодический ток (80% — вкл, 20% — выкл): 2,5 А;
- кратковременный ток: 3А;
- рабочие температуры: -25 … +135 С;
- габариты: 43.5 х 43.2 х 29.4 мм;
- вес: около 33 г.
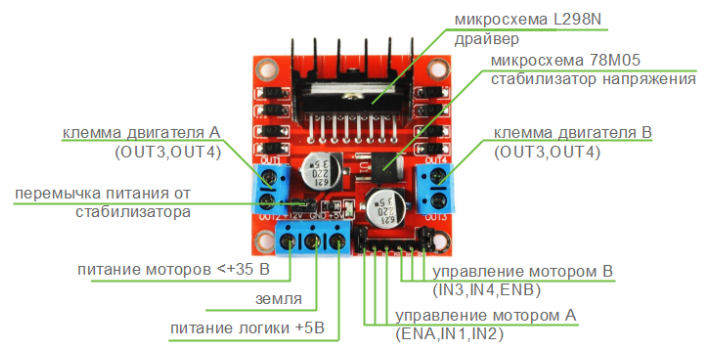
Распиновка контактов показана на скриншоте:
Подключение AD9833 к Ардуино
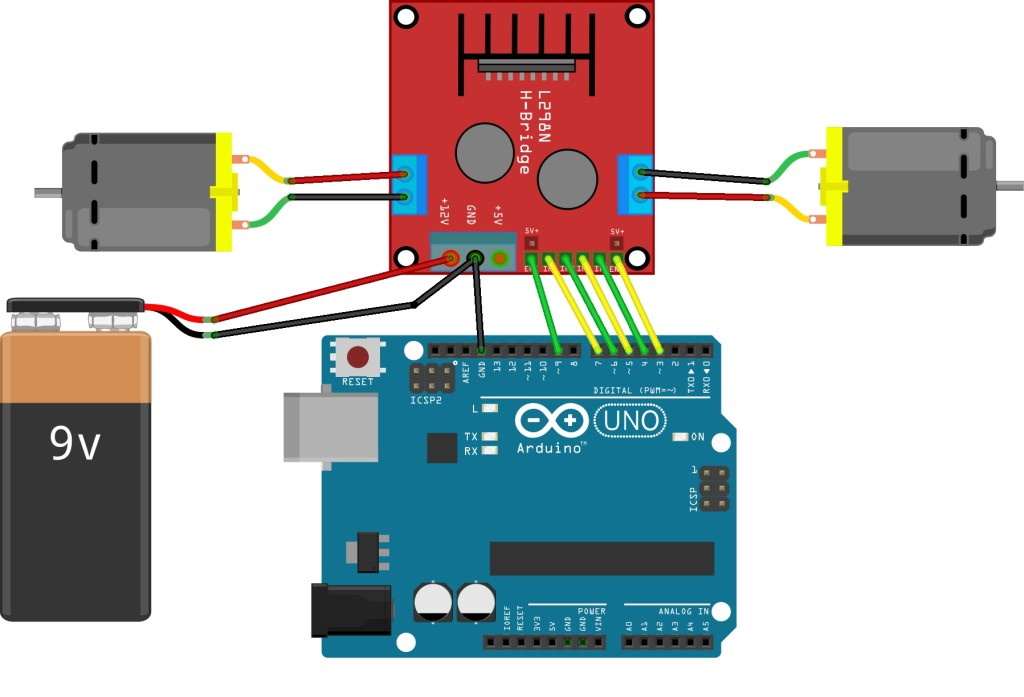
Для реализации простого проекта нам понадобятся такие компоненты:- плата расширения Ардуино Uno (Arduino Nano и другие совместимые микроконтроллеры также могут подойти)
- модуль платы управления моторами L298N
- шаговые двигатели (2 шт)
- соединительные провода
- источник питания (9 В.)
Теперь зальем скетч для тестирования (так называемого разгона с регулировкой скорости) мотора:
// подключите пины контроллера к цифровым пинам Arduino
// первый двигатель
int enA = 10;
int in1 = 9;
int in2 = 8;
// второй двигатель
int enB = 5;
int in3 = 7;
int in4 = 6;
void setup()
{
// инициализируем все пины для управления двигателями как outputs
pinMode(enA, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void demoOne()
{
// эта функция обеспечит вращение двигателей в двух направлениях на установленной скорости
// запуск двигателя A
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
// устанавливаем скорость 200 из доступного диапазона 0~255
analogWrite(enA, 200);
// запуск двигателя B
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
// устанавливаем скорость 200 из доступного диапазона 0~255
analogWrite(enB, 200);
delay(2000);
// меняем направление вращения двигателей
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
delay(2000);
// выключаем двигатели
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void demoTwo()
{
// эта функция обеспечивает работу двигателей во всем диапазоне возможных скоростей
// обратите внимание, что максимальная скорость определяется самим двигателем и напряжением питания
// ШИМ-значения генерируются функцией analogWrite()
// и зависят от вашей платы управления
// запускают двигатели
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
// ускорение от нуля до максимального значения
for (int i = 0; i < 256; i++)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// торможение от максимального значения к минимальному
for (int i = 255; i >= 0; --i)
{
analogWrite(enA, i);
analogWrite(enB, i);
delay(20);
}
// теперь отключаем моторы
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
}
void loop()
{
demoOne();
delay(1000);
demoTwo();
delay(1000);
}Модуль драйвера L298N довольно сложен в настройке, но если вы с нею справитесь, то получите достойный инструмент контроля ШД в проектах любой сложности. На этом пока все! До новых встреч!

Программист микроконтроллеров с 8-ми летним стажем, работал в таких компаниях как IBM, ASUS, Microsoft.
В комментариях с радостью отвечу на ваши вопросы.
Все статьи автора
Сегодня поговорим о том, как воплотить в жизнь подключение FPM10A к Arduino, что это за модуль, где используется, каковы параметры его работы и т.д. Речь идет...

Сегодня у нас на рассмотрении подключение MQ-135 к Arduino и все, что с ним связано. Данная тема и в особенности модуль сенсора выбраны не случайно, ведь в...
Сегодня говорим о цифровом датчике линии TCRT5000 и его подключении к Arduino. Устройство достаточно функционально, оно широко применяется в конструировании и...
На повестке дня – подключение L293D к Arduino, знакомство с техническими характеристиками модуля, его практическим применением и простейшими схемами сборки....
В этой статье мы рассмотрим подключение ADS1115 к Ардуино. Речь идет о 16-битном аналого-цифровом преобразователе, оснащенном 4 входами непосредственно для...